Joaquin Palacios
Robotics Engineer from Quito, Ecuador.
I am a PhD candidate in Mechanical Engineering at Columbia University, where I work as a research assistant at ROAM Lab, advised by Matei Ciocarlie.
I am passionate about working on the full stack of robotics: mechanical design, firmware implementation, controls, and robot learning! My research interests are primarily in autonomous robot manipulation and medical assistive robotics.
Welcome to my portfolio website!
Email: joaquin (dot) palacios (at) columbia (dot) edu
Highlights


Robot hand with 6-axis F/T sensorized fingertips and novel kinematics validated via RL policies.
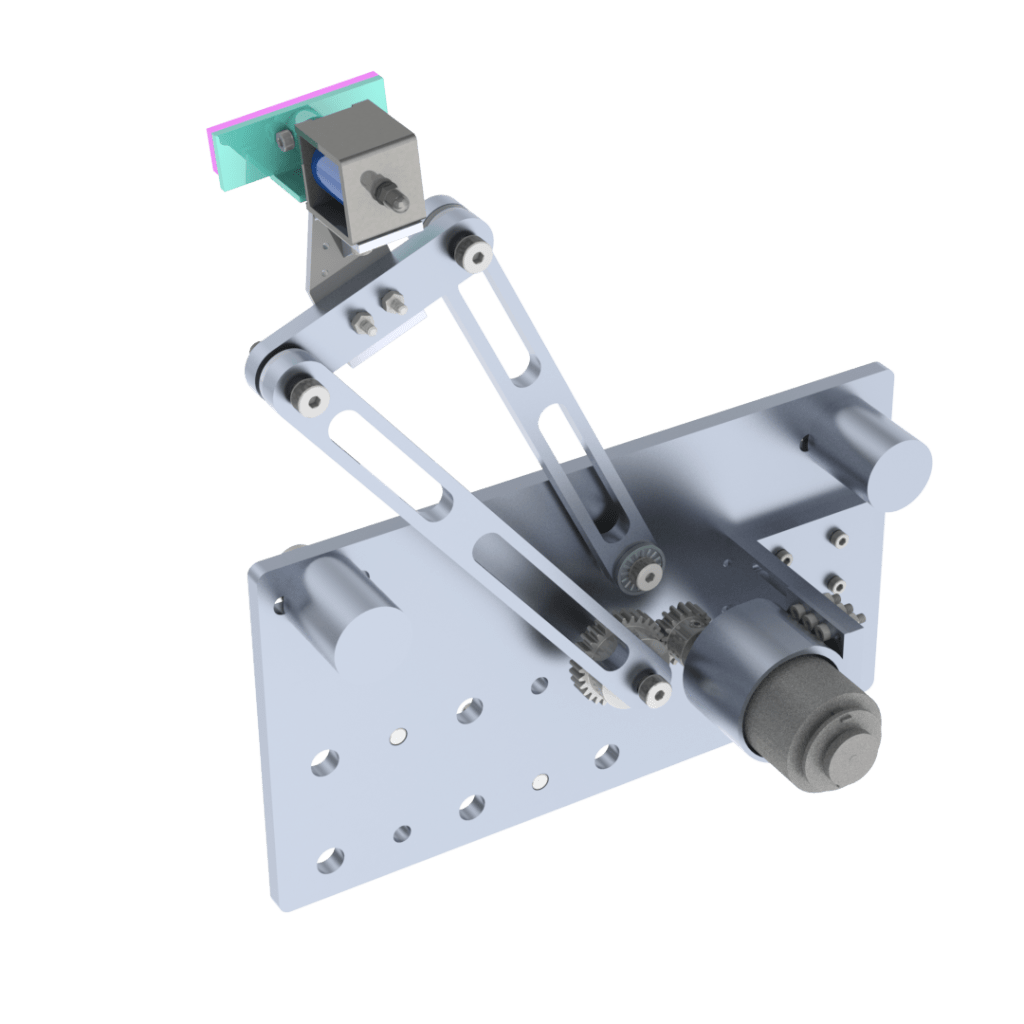
Robotic crop pollination for Vertical Farming.
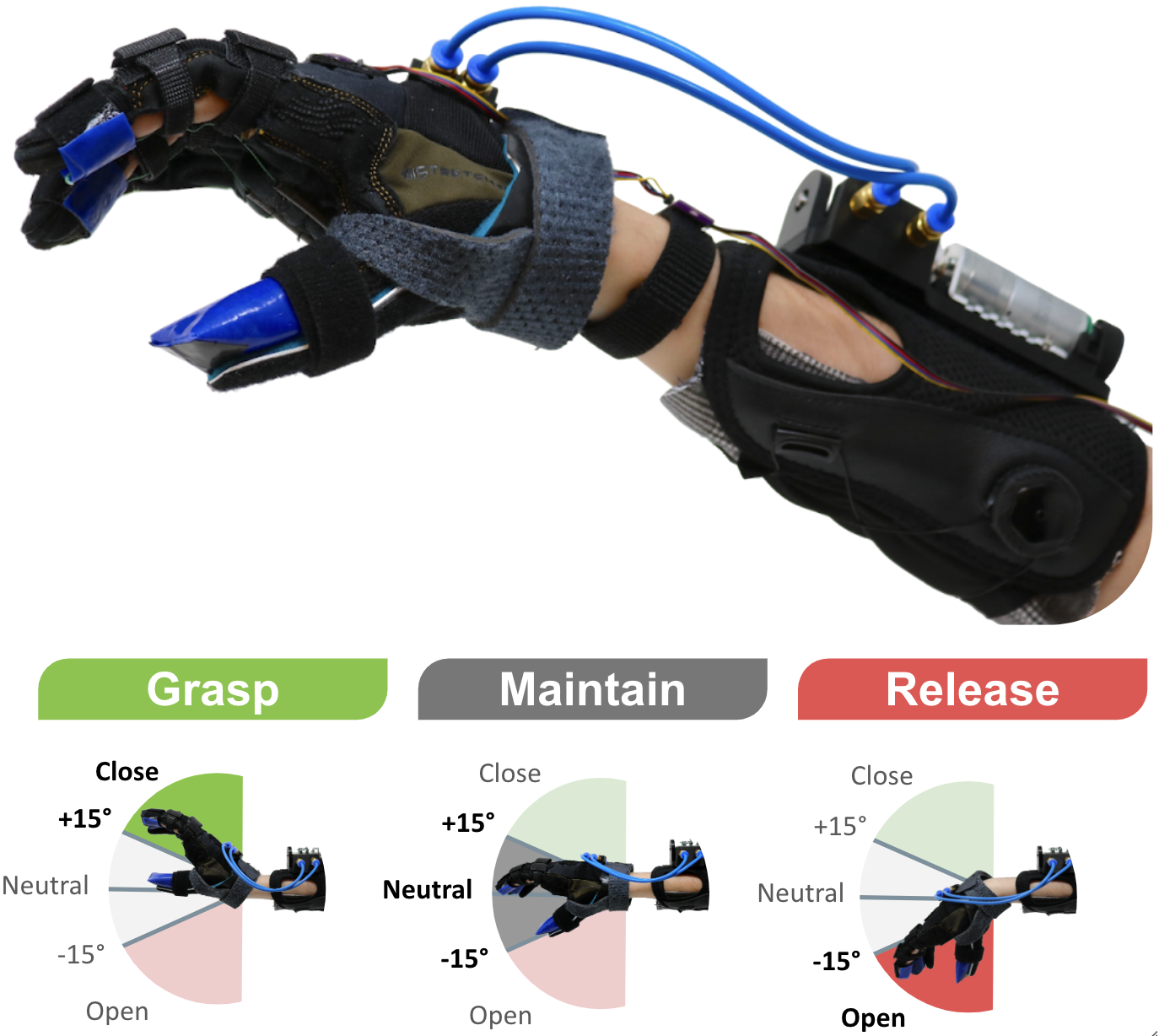
Wearable robot to assist grasping for individuals with Spinal Cord Injuries.

Developing a robot hand to explore proprioception in dexterous manipulation.
A quadruped robot known for being cute and fast!
An exploration of mechatronics, machine design, controls, and machining.

A collection of projects exploring generative design, topology optimization, additive manufacturing, and more.
Projects in applied robotics, leveraging ROS 2 to implement (from scratch) cartesian control, inverse kinematics, path planning (using RRT algorithm), and more.
Robots used: UR5e, Franka Emika.