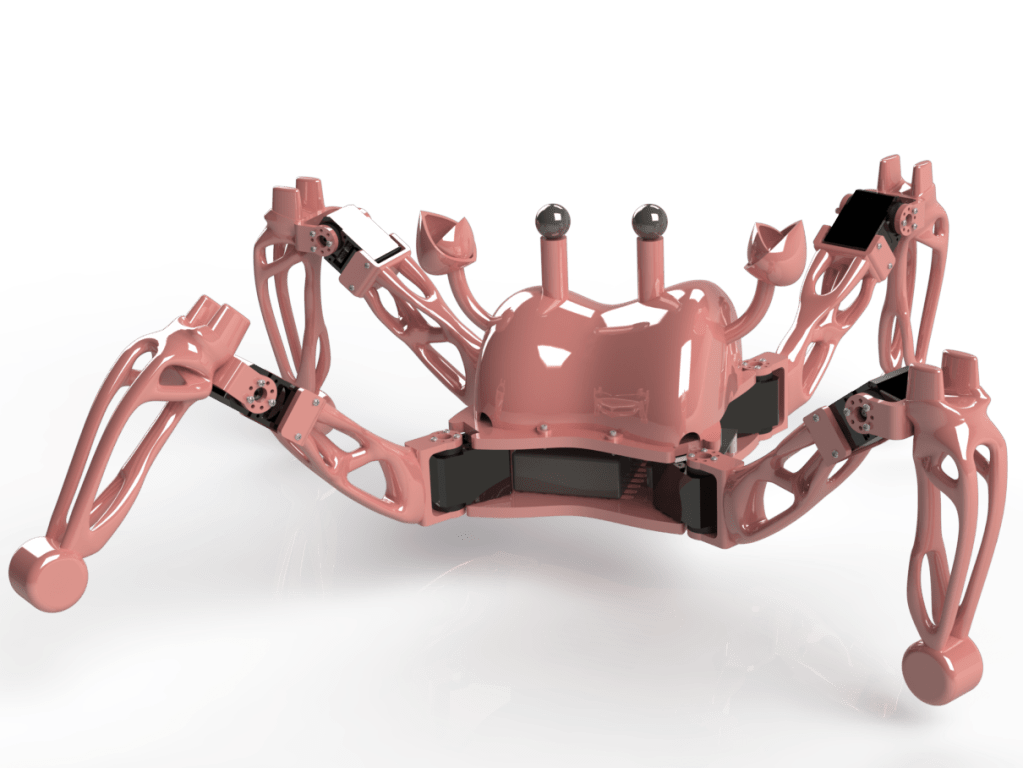
A quadruped robot known for being cute and being fast!
Description:
As part of the Robotics Studio course at Columbia University, my partner Valentina Gonzalez and I designed and built this unique walking robot.
Area:
Robotic Locomotion
Technical Contribution:
Mechatronics Design
Software (Firmware Implementation)
Year:
2022
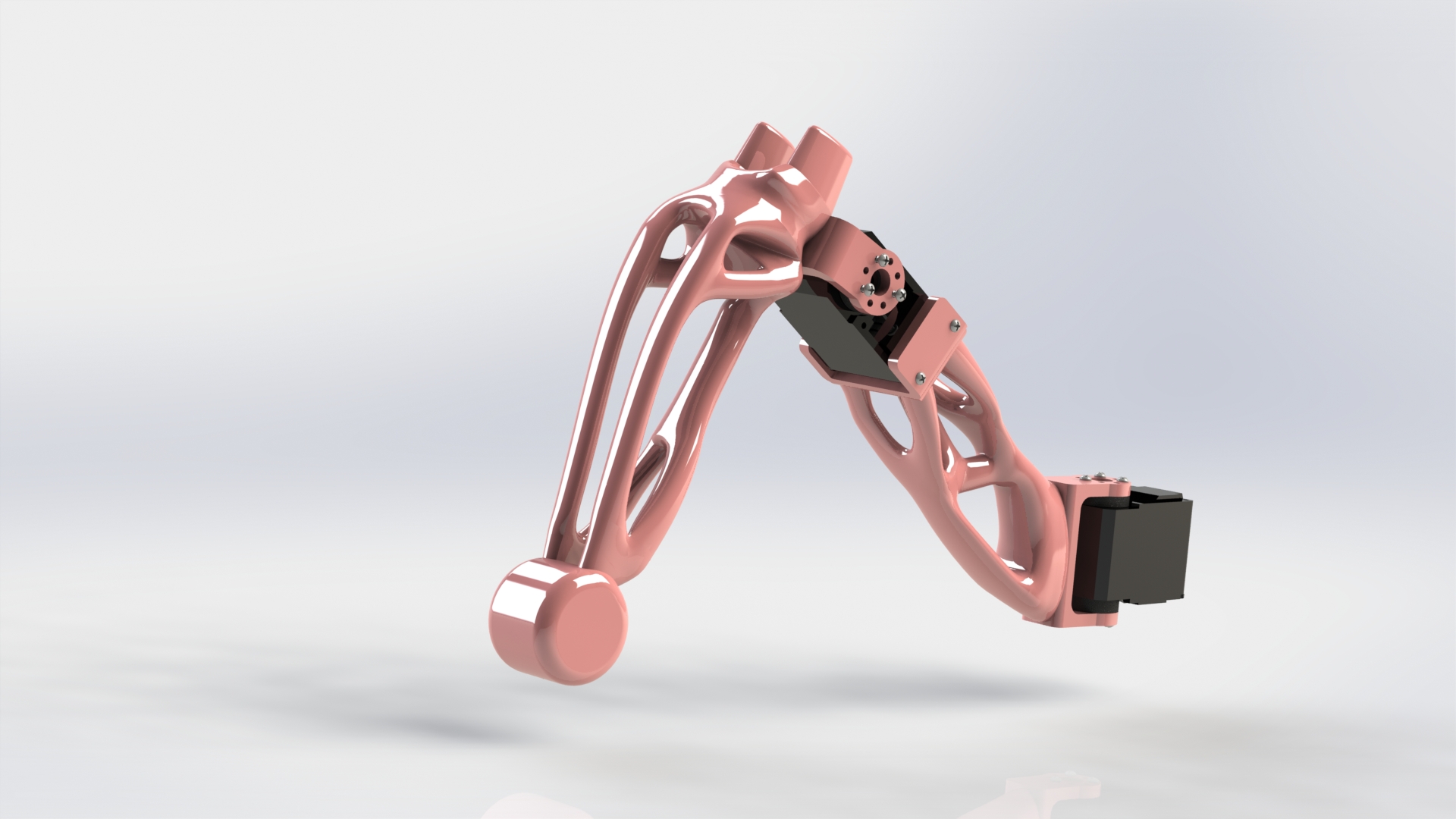
Topology Optimization
To go fast, crab.io had to be light, and topology optimization allowed us to keep the robot lightweight!
Gallery: