
Designing and building a robot hand to explore proprioception in dexterous robot manipulation.
Mechanical design and firmware implementation for torque control of a tendon driven robot hand.
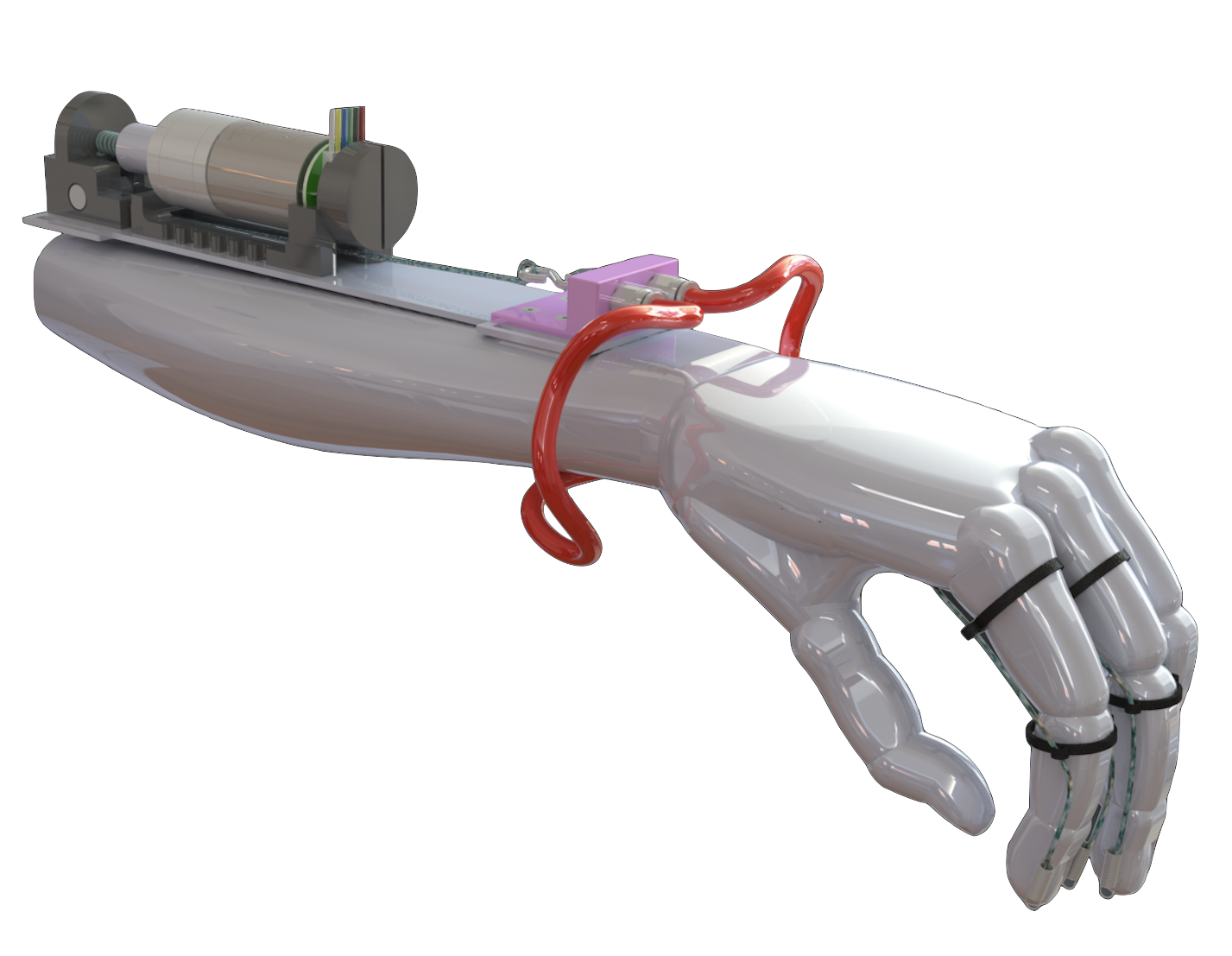
Creating a wearable robot to assist in grasping for individuals with Spinal Cord Injuries.
A study on tenodesis-based user control for grasping force modulation, promoting the development of intuitive assistive devices.
