A tendon-driven robot hand, exploring proprioception in dexterous manipulation.
Description:
The ROAM Hand was developed as a hardware testbed to explore how proprioception can augment other sensing modalities, like tactile sensing and computer vision, in an effort to achieve dexterous manipulation.
The fingers are driven by tendons connected to servos inside the palm, with a load cell measuring the reaction torque of each motor, allowing us to sense the torque at each joint. This is robotic proprioception.
Research Area:
Robotic Manipulation
Technical Contributions:
Mechanical Design
Firmware Implementation
Year:
2023
My Role
Redesign of tendon routing and pulley transmission to reduce friction and improve torque sensing. A key challenge I had to overcome was routing tendons in such a way each joint remains uncoupled.
Implementing firmware for position control and torque sensing. Integrating with ROS architecture.

Gallery:
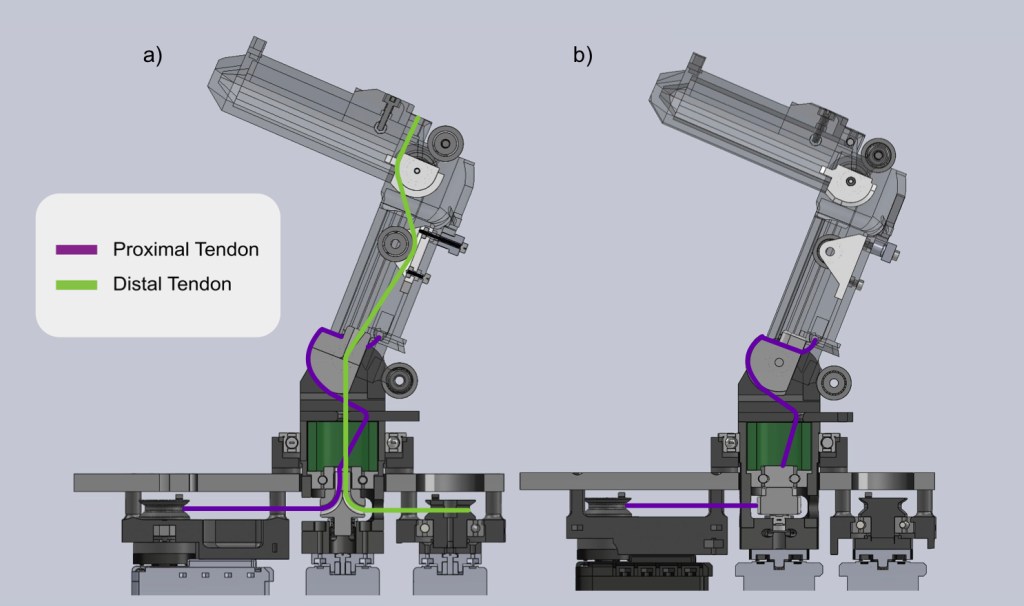
Tendon routing for proximal and distal links.

Render of ROAM Hand.
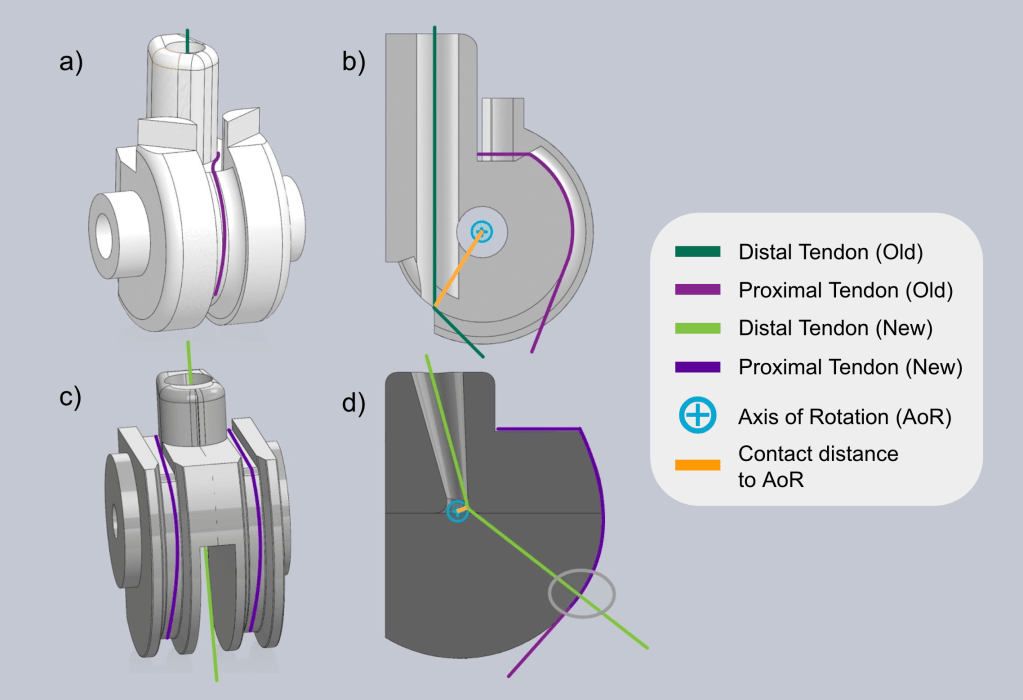
Joint Pulleys: The distal tendon has to run exactly through the center of the proximal joint or else it creates joint coupling. To accomplish this, I placed the proximal tendon off the central axis, and added a second tendon to balance out the moments.

Manufacturing: 3D printing using FDM and SLA printers. Pulleys and teflon tubing added in critical friction locations.

Roll Joint: To allow the finger to rotate about the base without affecting the proximal and distal tendons, a «floating piece» sandwiched between bearings routes the tendons.

