Robot hand with 6-axis F/T sensorized fingertips and novel kinematics validated via RL policies.
Description:
Iterative design cycle with robot learning in-the-loop to develop a novel dexterous robot hand. Validating kinematics by training dexterous in-hand manipulation skills via Reinforcement Learning.
6 Axis Force/Torque sensorized fingertip development is being led by collaborators Amr El-Azizi, Sharfin Islam, and Pedro Piacenza.
As seen in: Wall Street Journal (2025)
Research Area:
Autonomous Robotic Manipulation
Technical Contribution:
Mechanical Design, Kinematic Validation via RL Policies
Years:
2024 – 2025
Collaborators:
Eugene Sohn, Veronika Zam, Amr El-Azizi, Sharfin Islam, Dongxiao Yang, Eric Chang, Zhanpeng He, Pedro Piacenza and Matei Ciocarlie
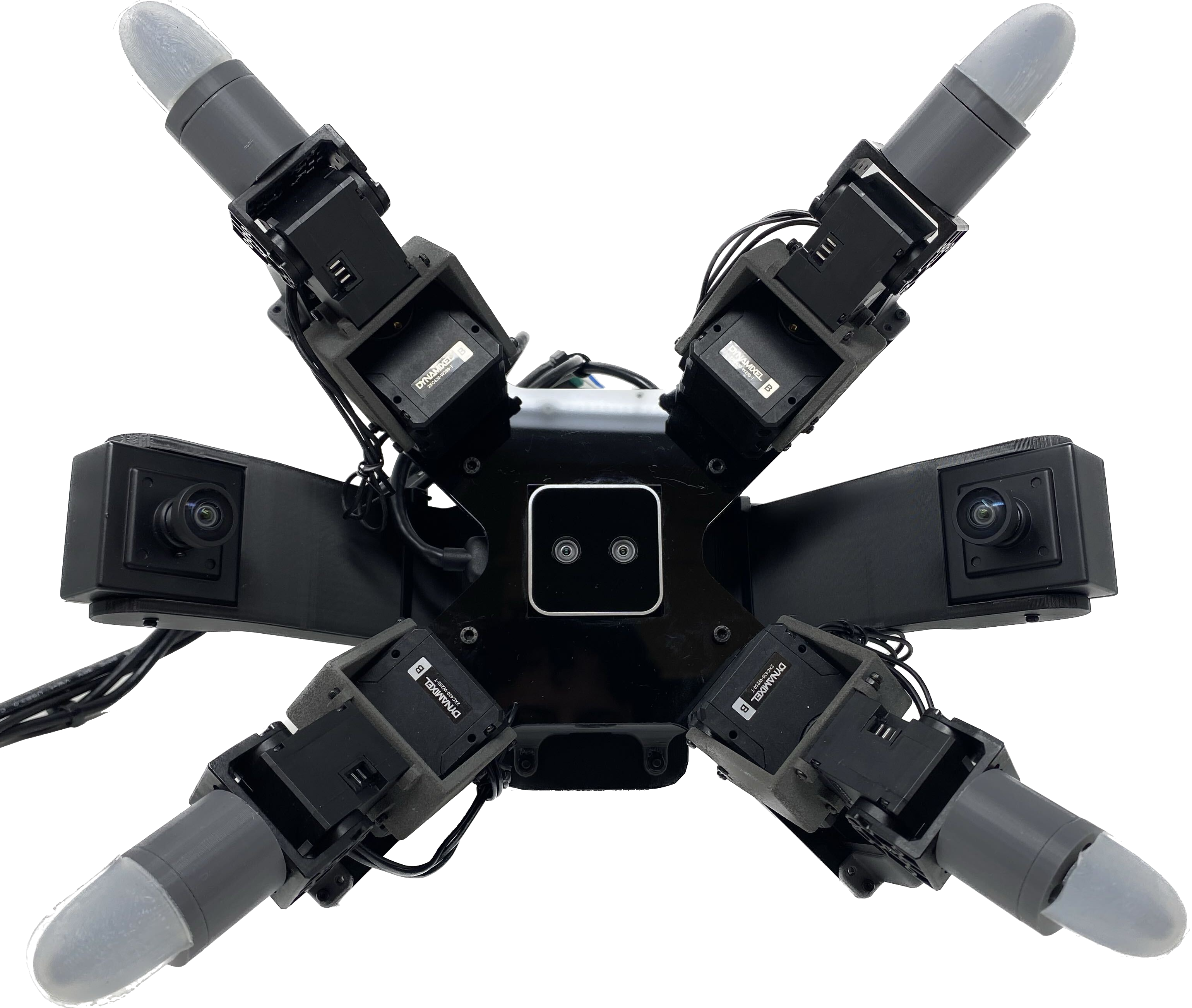
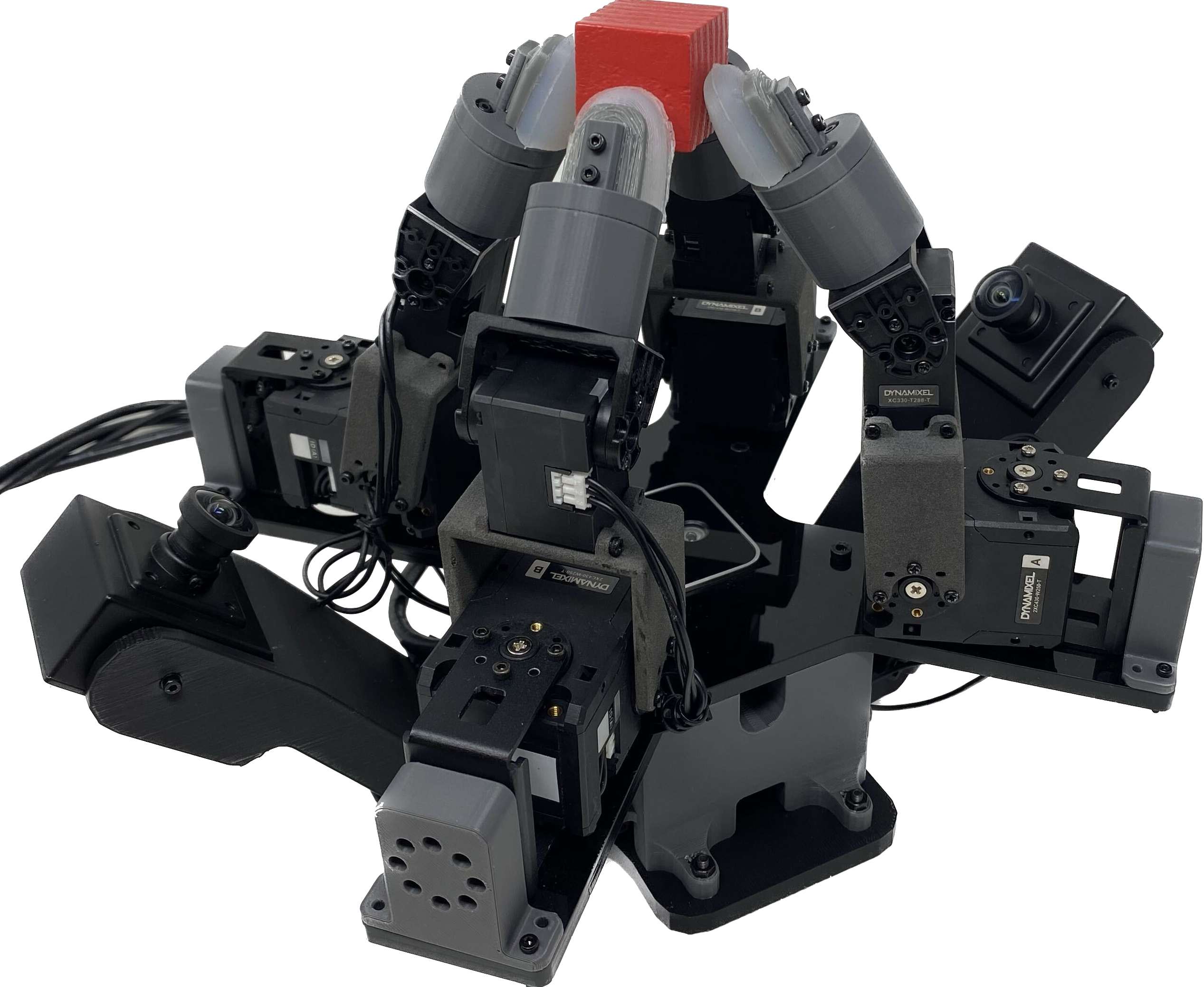
Anthropomorphic Hand (RH3-A)



Non-Anthropomorphic Hand (RH3-NA)